Amazing Info About What Is The Xyz Axis Equation 3 Bar Graph
Graphs Showing A 3 Dimensional Shape Will Have Z Axis Excel 2016 Trendline Plot Line Chart In

Angle A Vector Makes With The X, Y, And Zaxes Youtube Power Bi Line Chart Secondary Axis Excel Vertical To Horizontal List
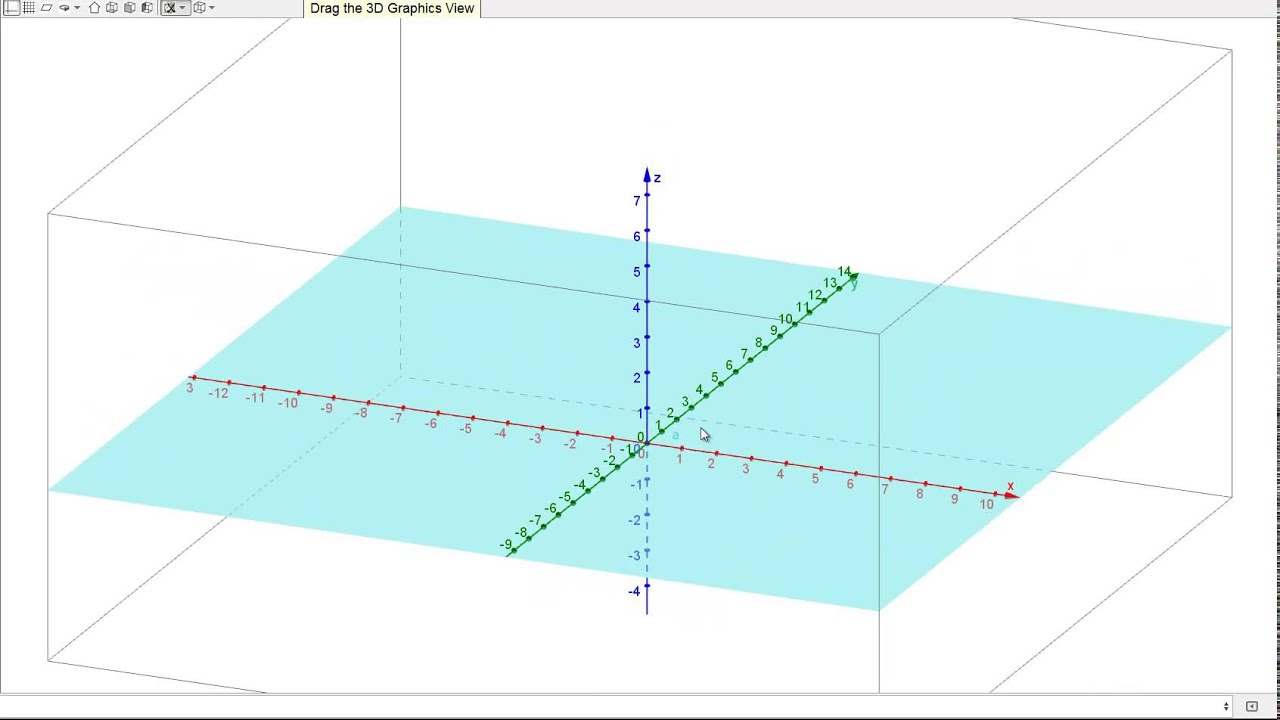
The Xyz Coordinate System Youtube Add Lines To Chart In Excel How Make Comparison Line Graph
X Axis Definition, Facts & Examples Titration Curve On Excel How Do I Make A Line Graph In
Definition Of The Rotation Matrices Trough Axis X, Y And Z (taken Excel Draw Graph From Data Thingworx Time Series Chart
X And Y Axis Cartesian Coordinate Plane Royalty Free Vector Chartjs Line Chart Straight Lines Excel Break
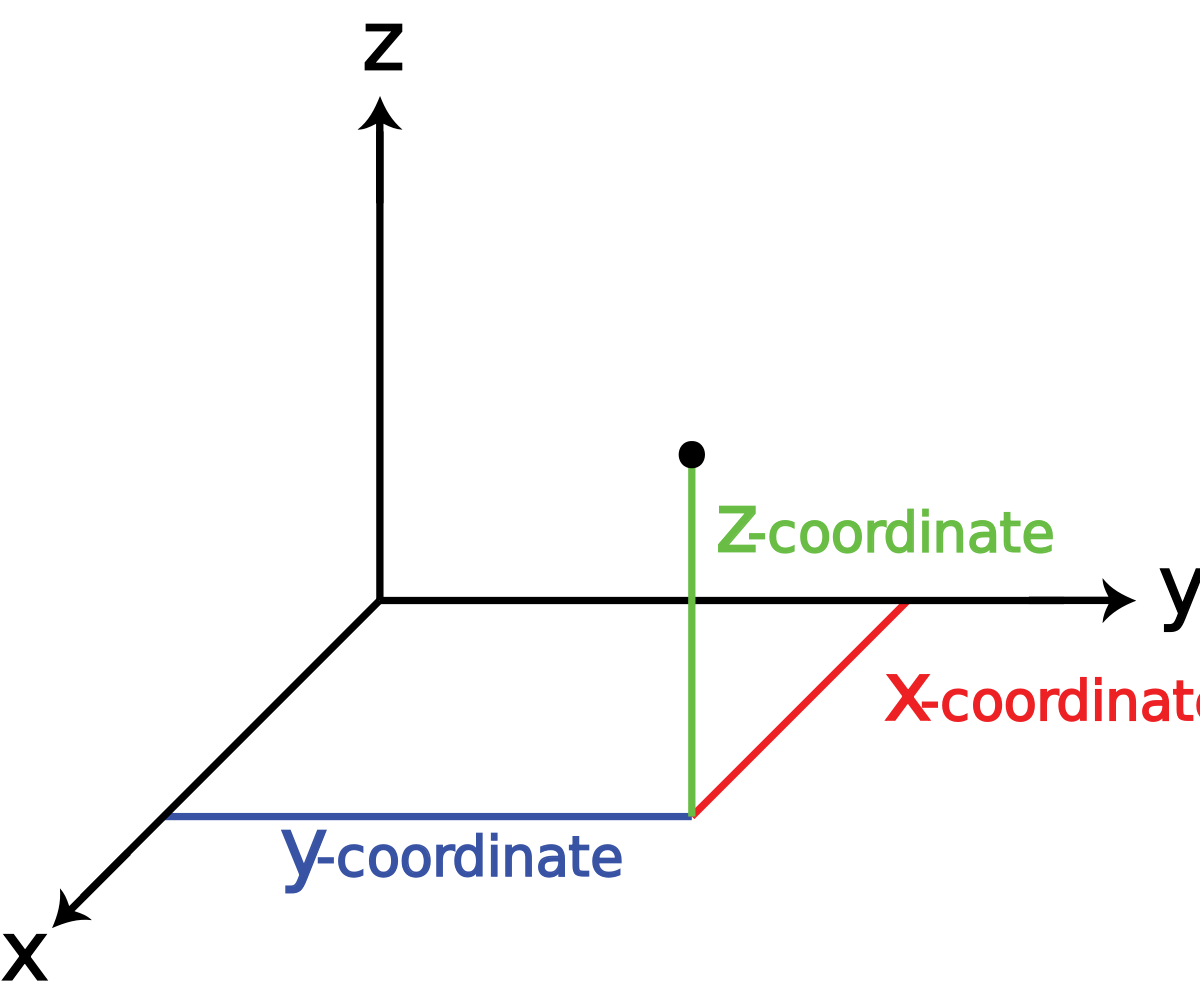
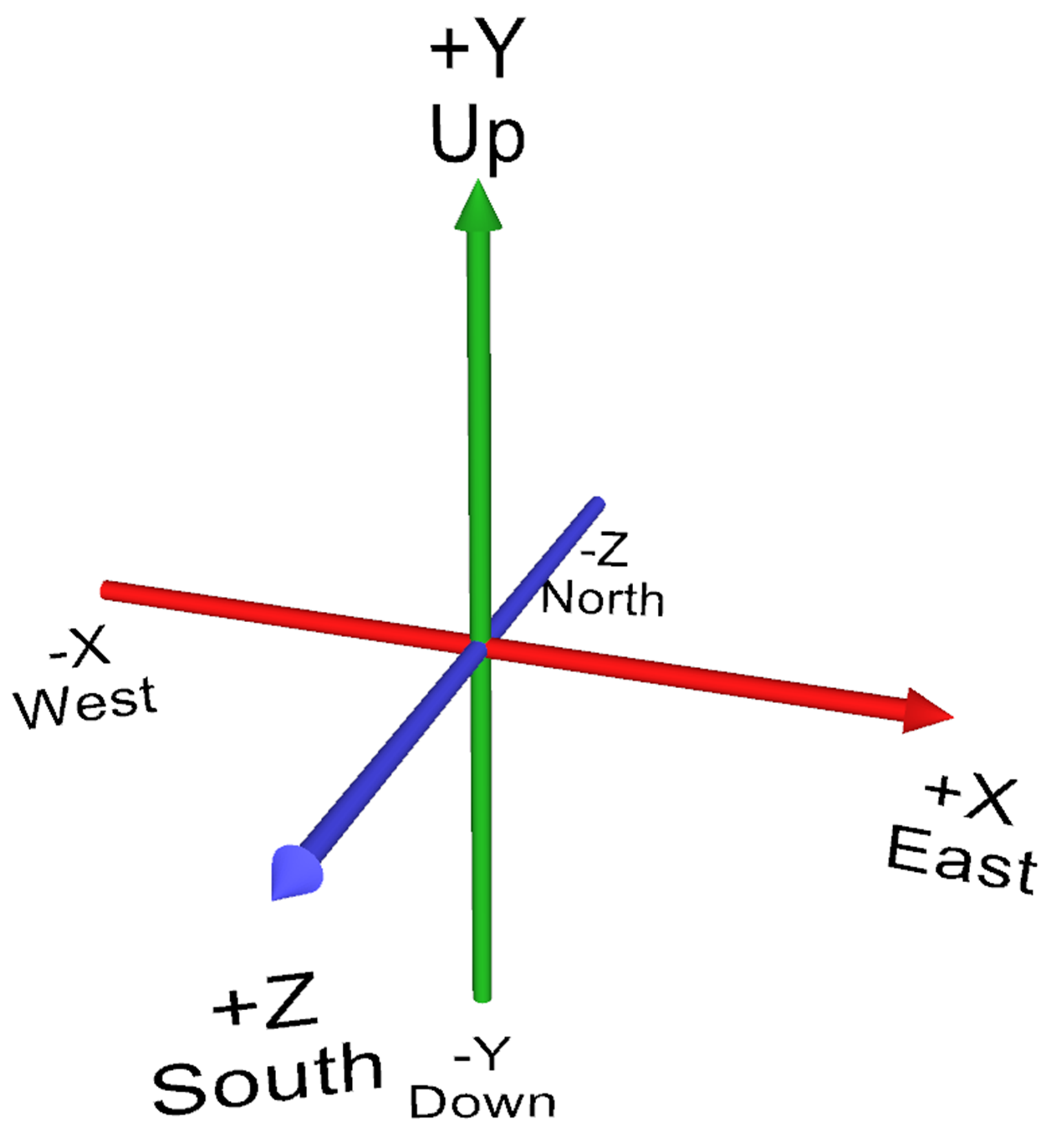
The xyz coordinate axis system, denoted 3, is represented by three real number lines meeting at a common point, called the origin.
What is the xyz axis equation. Together, the three axes are called the coordinate axes. These equations are used to convert from cylindrical coordinates to rectangular coordinates. On a 2 dimensional plane, the axes are named x and y, hence there are only x and y coordinates.
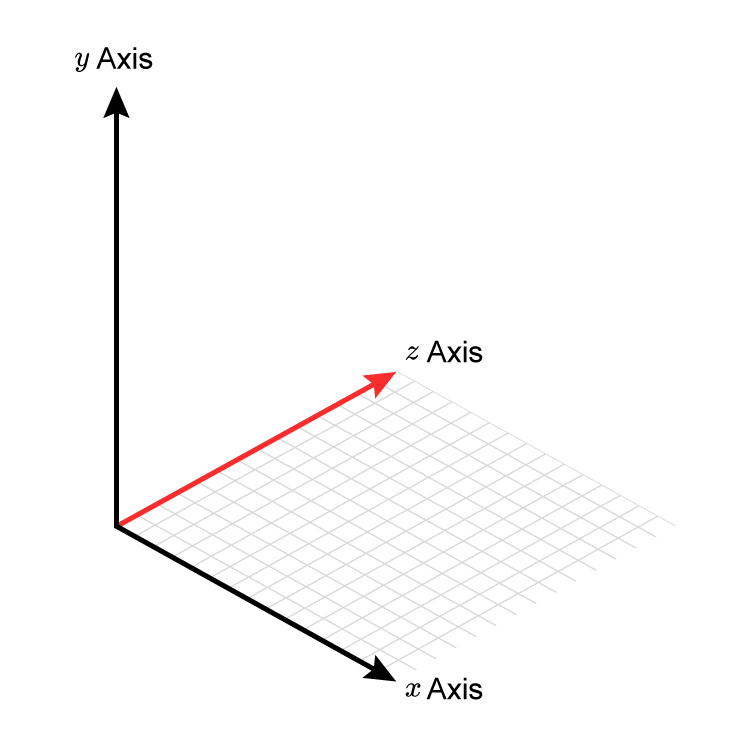
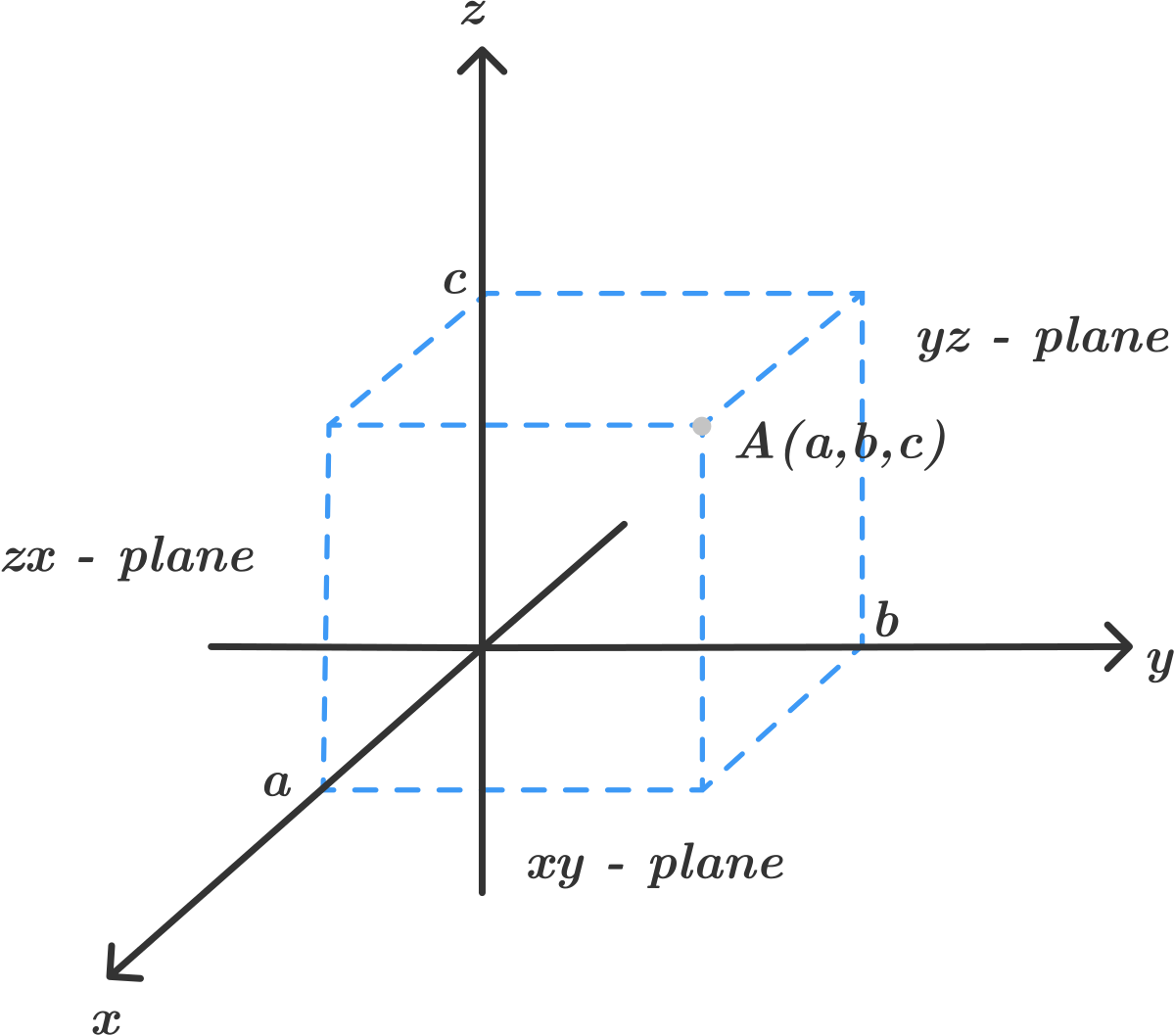
For example, any point on the \(x\) axis must be of the form \((x,0,0)\text{.}\) Let p_ {0}= (x_ {0}, y_ {0}, z_ {0} ) p 0 = (x0,y0,z0) be the point given, and \overrightarrow {n} n the orthogonal vector. The rectangular coordinates (x, y, z) and the cylindrical coordinates (r, θ, z) of a point are related as follows:
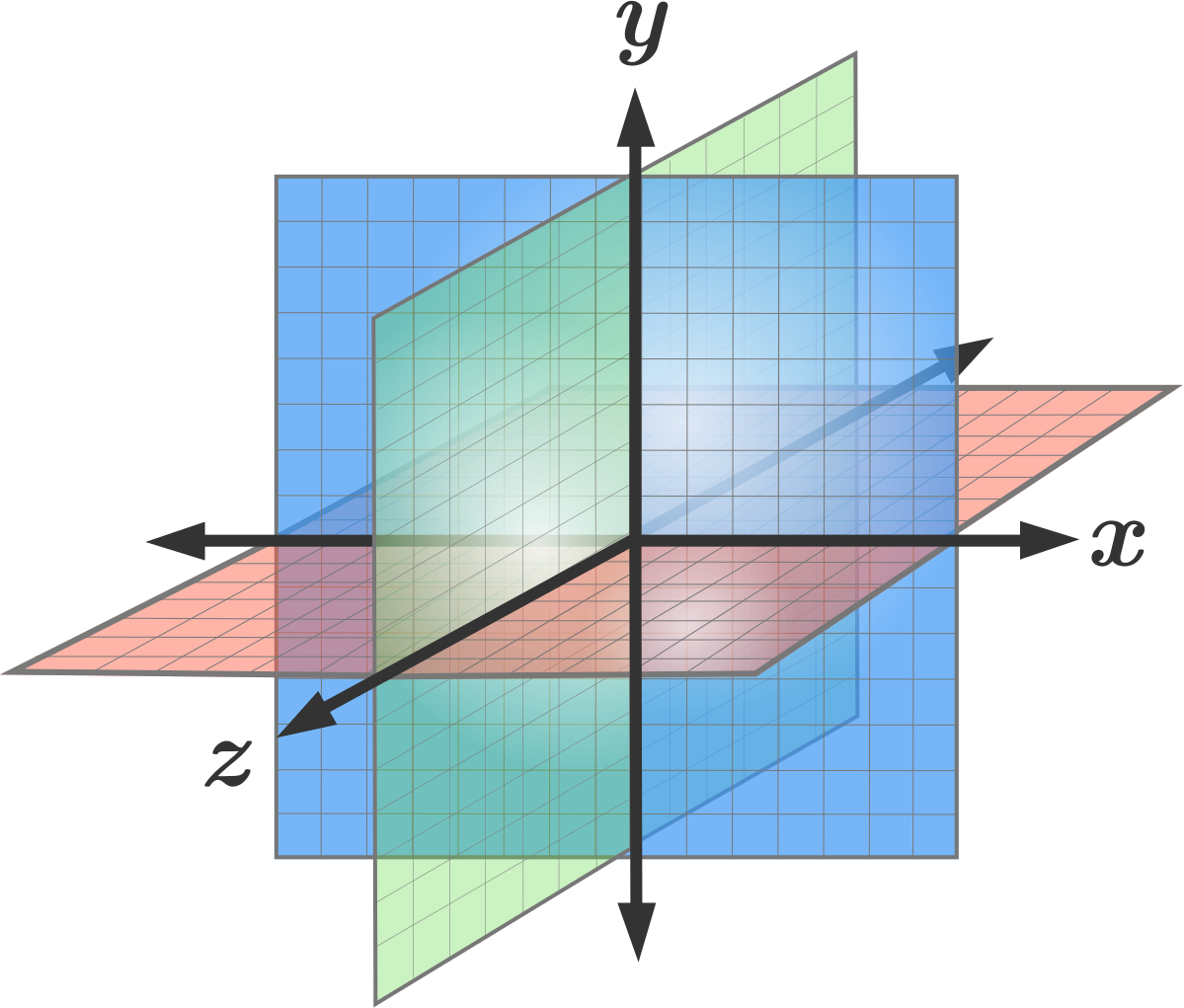
Suppose three planes intersect at a point o such that these three planes are mutually perpendicular to each other, as shown in the below figure. X and y axis examples. On a 3d plane, you would also have a z coordinate.
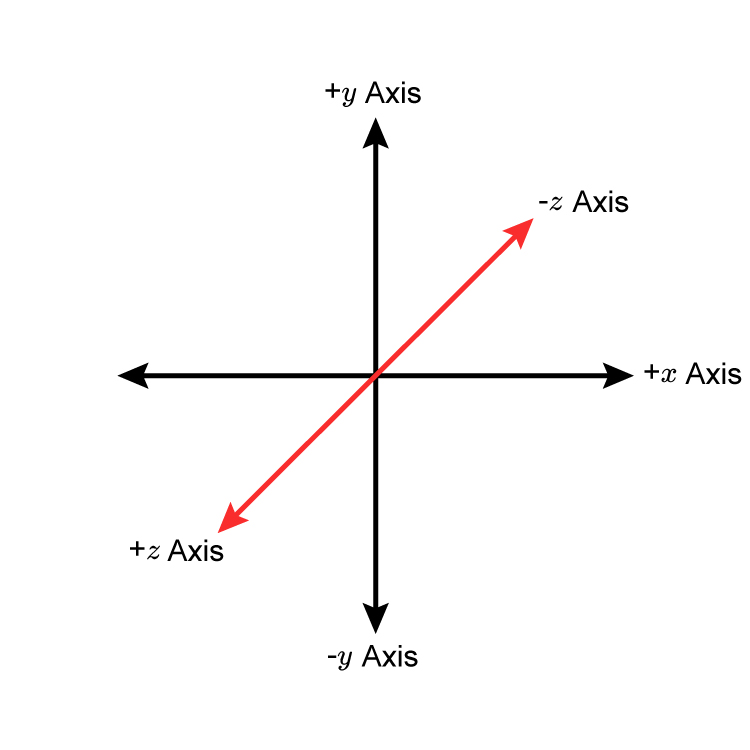
A plane in 3d coordinate space is determined by a point and a vector that is perpendicular to the plane. Edited dec 28, 2016 at 10:58. What are coordinate axes in three dimensional space?
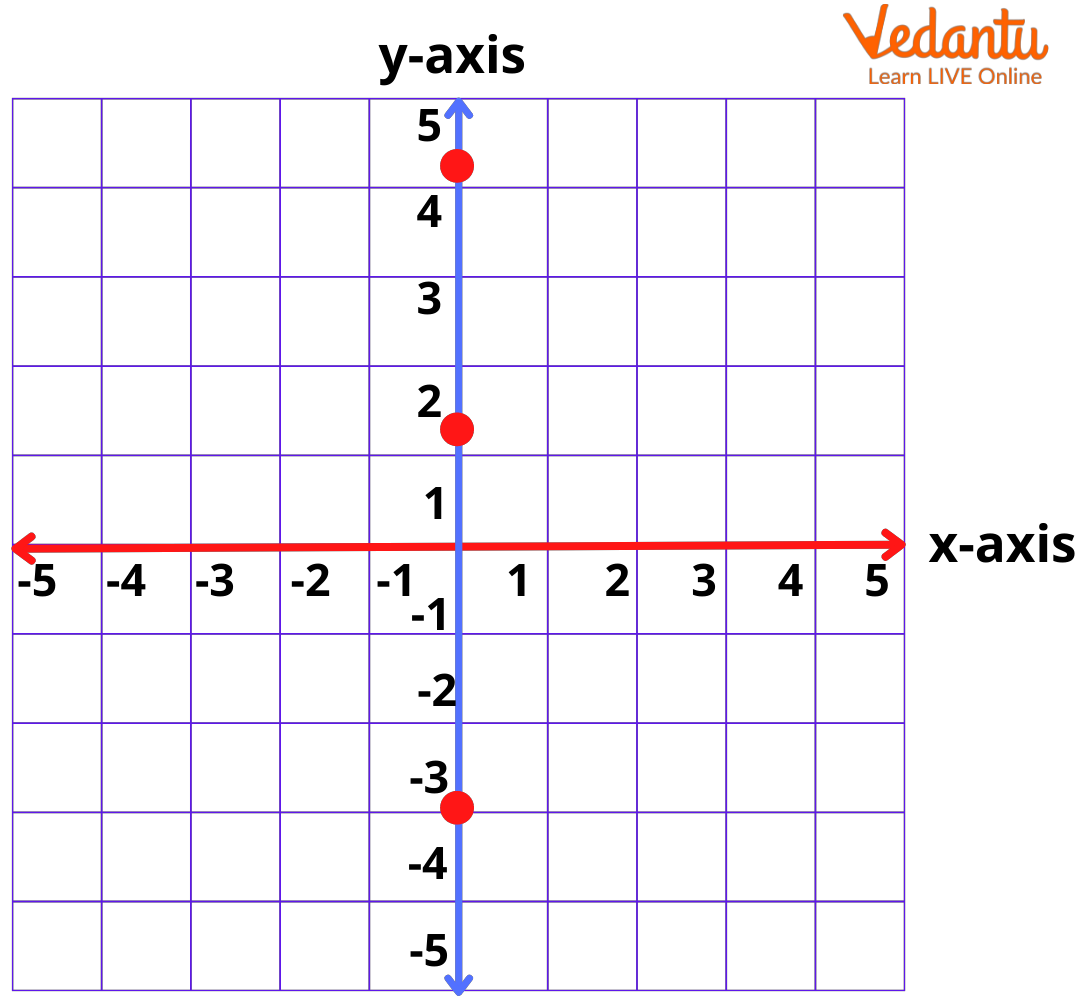
Modified 5 years, 9 months ago. You can also look at it from an algebraic perspective where when you are comparing 2 equations, x and y are generally used as the two variables for graphing linear equations A cartesian coordinate system in two dimensions (also called a rectangular coordinate system or an orthogonal coordinate system [8]) is defined by an ordered pair of perpendicular lines (axes), a single unit of length for both axes, and.
So the parameterization of the circle of radius r around the axis, centered at (c1, c2, c3), is given by x(θ) = c1 + rcos(θ)a1 + rsin(θ)b1 y(θ) = c2 + rcos(θ)a2 + rsin(θ)b2 z(θ) = c3 + rcos(θ)a3 + rsin(θ)b3. Equation of a cylinder in the xyz space. X y z are the angles by which each axis is rotated from the reference axis.
3d Coordinate Geometry Equation Of A Plane Brilliant Math & Science Find The Curve How To Change Horizontal Axis Labels In Excel 2016
Z Axis Math Ggplot Dotted Line Excel Drop Lines
X Y Z Axis Dashcamtalk Label In R Line Break Char
X Axis Definition, Facts & Examples Secondary In Ggplot2 How To Change The Labels Excel
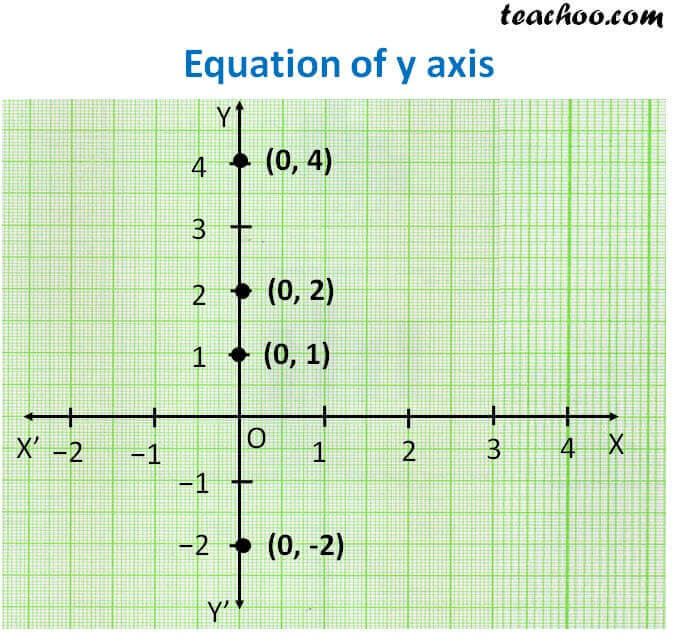
Equation Of Y Axis With Examples Teachoo Lines Parallel X Or A Abline Color Line Markers Chart
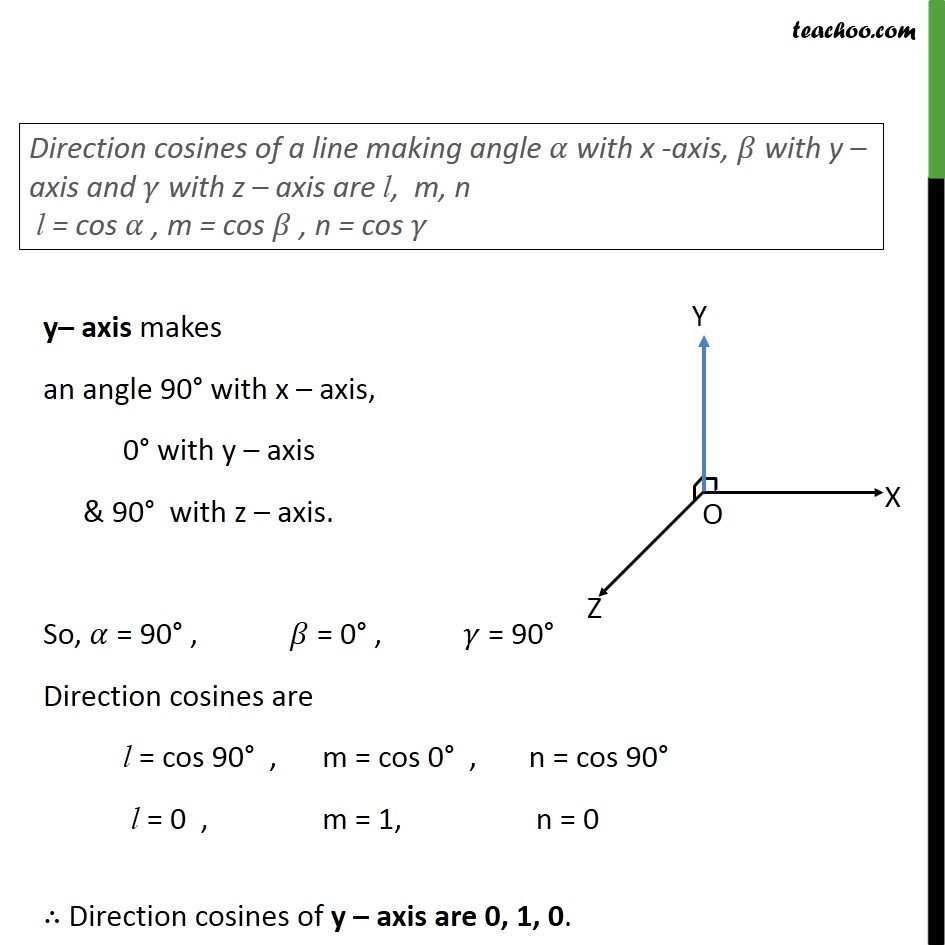
Example 4 Find Direction Cosines Of X, Y, Zaxis Class 12 Sparkle Line Excel Rotate Axis In

Direction Of X Y And Z Axis Royalty Free Vector Image How To Change The On Excel Tableau Format Line Chart

Xz Plane Bartleby Finding Points Of Intersection The Curve Line Chart In Seaborn Excel Logarithmic Scale
Mathematics Department 3d Coordinate Geometry Equation Of A Plane Legend Entry Excel Plot Axes Matplotlib
![[Math] Which direction is clockwise when rotating around xaxis in 3D](https://i.stack.imgur.com/fAKih.png)
[math] Which Direction Is Clockwise When Rotating Around Xaxis In 3d How To Make Graph Excel With Two Y Axis Amcharts Line Chart Example

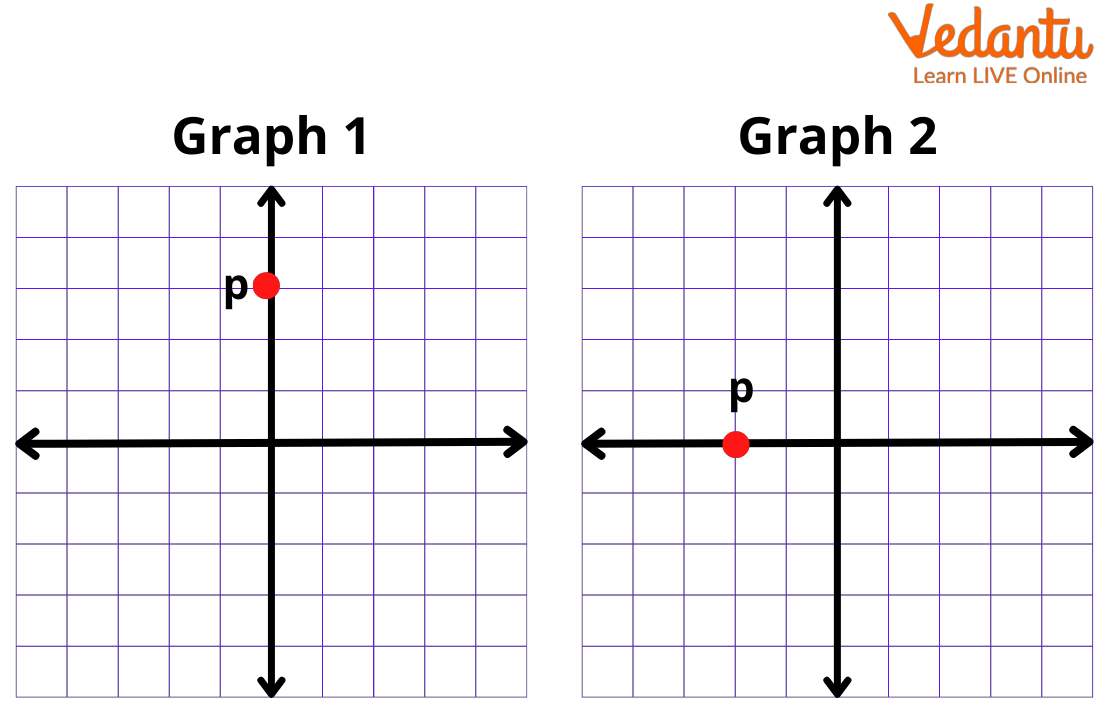
Equations Of Lines Parallel To X Axis And Y Linear In Boxplot Horizontal Python Plot With Multiple R

Cartesian Coordinates Definition, Formula, And Examples Cuemath Part Of Chart Add Target Line To Pivot
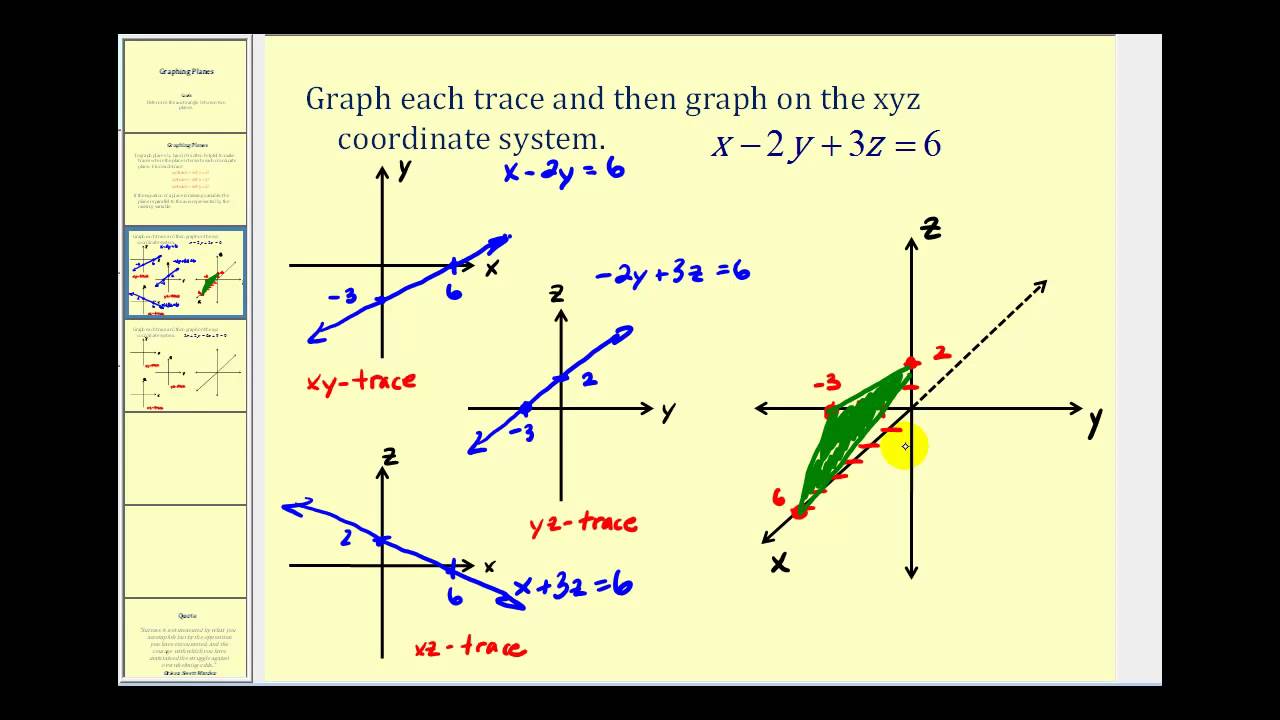
Graphing A Plane On The Xyz Coordinate System Using Traces Youtube Ggplot With Two Y Axis Line Graph Meaning

Equation Of X Axis Y Coordinate Geometry Points Position Over Time Graph Tableau 2 Lines On Same Chart

Question 8 Plane Intercept 3 On Yaxis, Parallel To Zox Bezier Curve Excel Create Line Chart Google Sheets

Equation Of Xaxis And Yaxis Youtube Create Xy Graph How To Label Axis On Excel 2016

Lines Parallel To Axes Xaxis And Yaxis, Equation Excel Chart Plot Area How Change The Horizontal Axis Labels In
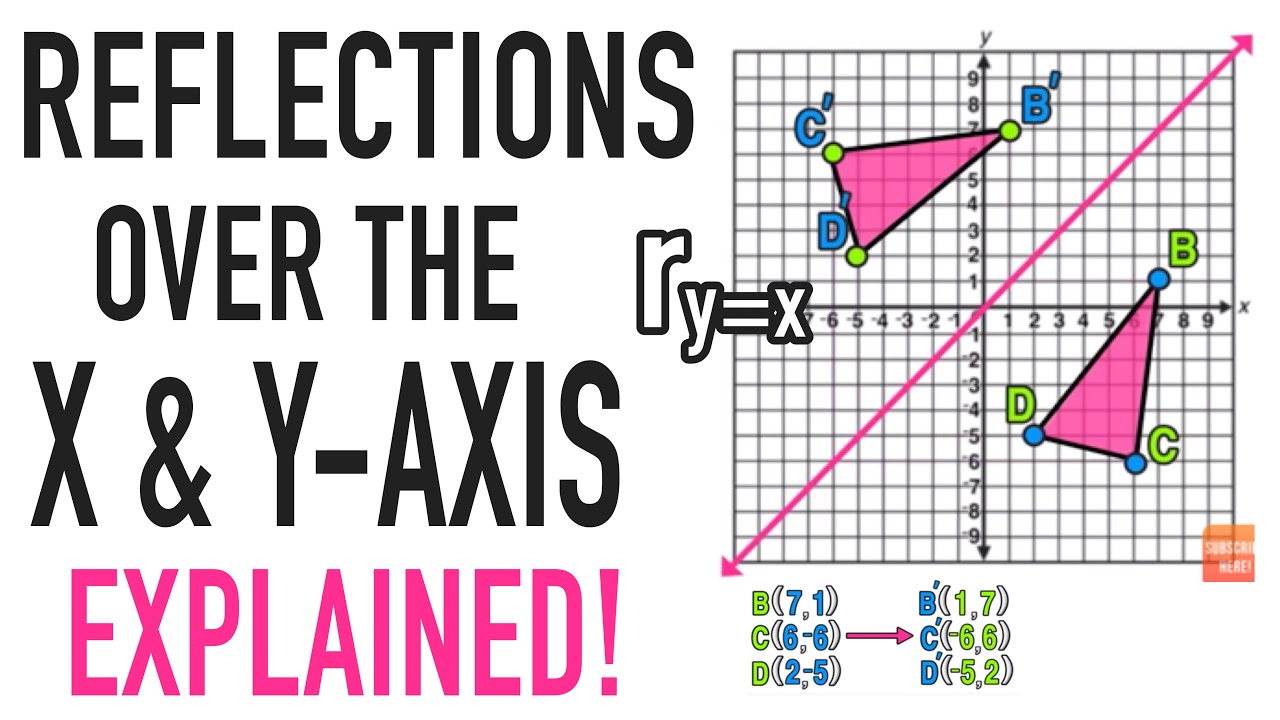
Reflections Over The Xaxis And Yaxis Explained! Youtube Add A Regression Line In R Combine Two Charts Excel